|
Arduino
ist eine Open-Source-Plattform für elektronische Hardware und eignet sich aufgrund von Anschaffungskosten,
Kompatibilität, vorhandenen Programmbibliotheken und
verhältnismäßiger Einfachheit hervorragend für den Roboterbau im Schulbetrieb.
Eine kleine Einführung gibt es hier . Mit Scratch for Arduino (S4A) lässt sich ein Arduino-Board mit der Programmiersprache für Schüler ansprechen. Die Firmware findet man hier. Allerdings muss das Board die ganze Zeit mit dem Computer verbunden sein. |
||||
PWM = pulsweitenmoduliert (siehe Pins) Je nach Board muss in der Arduino-Sopfware unter 'Werkzeuge', 'Board' eine andere Einstellung vorgenommen werden. Eine Tabelle findet man hier. Die Pins des Boards können durchaus verwirrend wirken, da einige von ihnen doppelt belegt sind und selbst digitale Pins mit dem pulsweitenmodulierten Prinzip als analoge Pins verwendet werden können. |


| Die wichtigen Sachen als erstes: | |
|
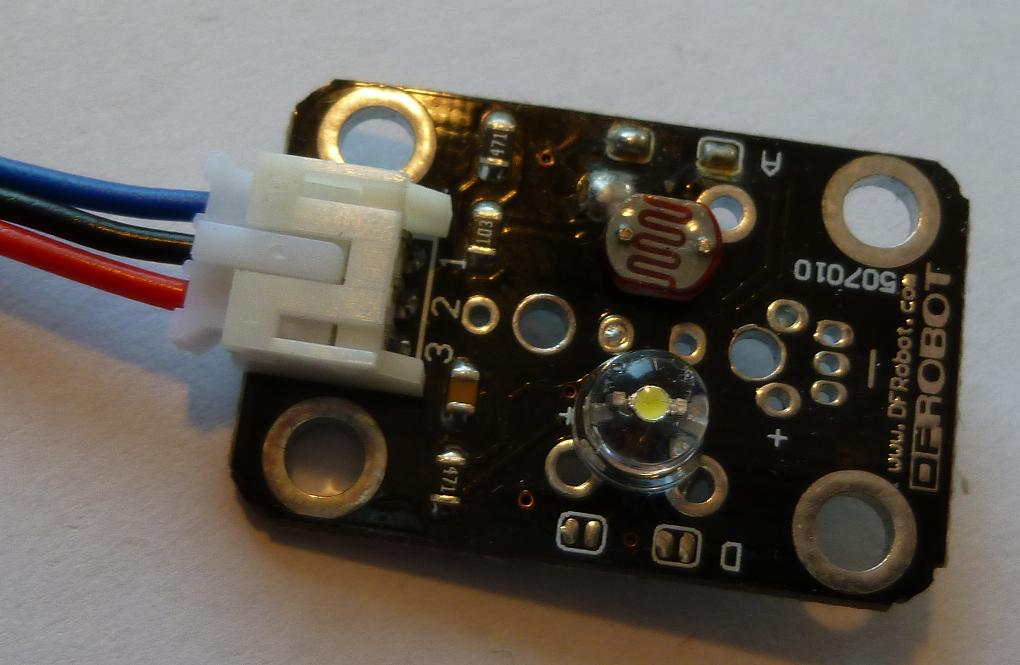
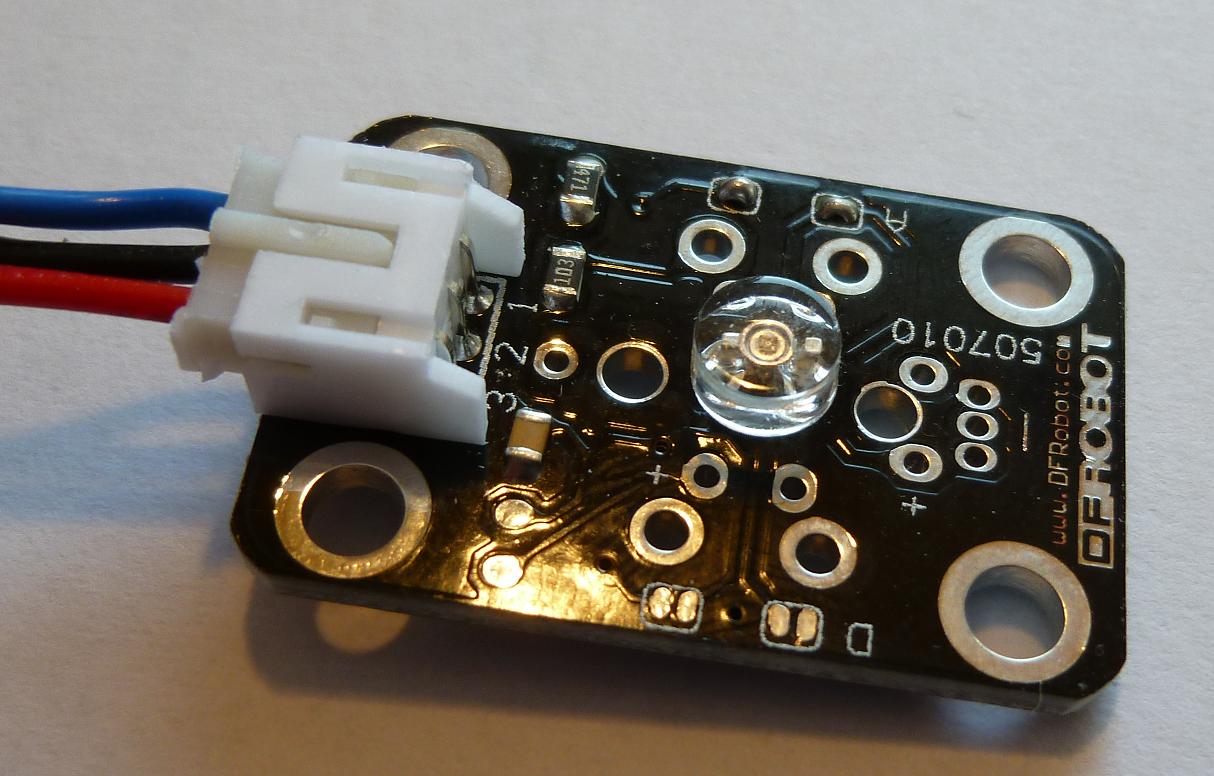
Lichtsensor mit Eigenlicht durch eine Diode |
|
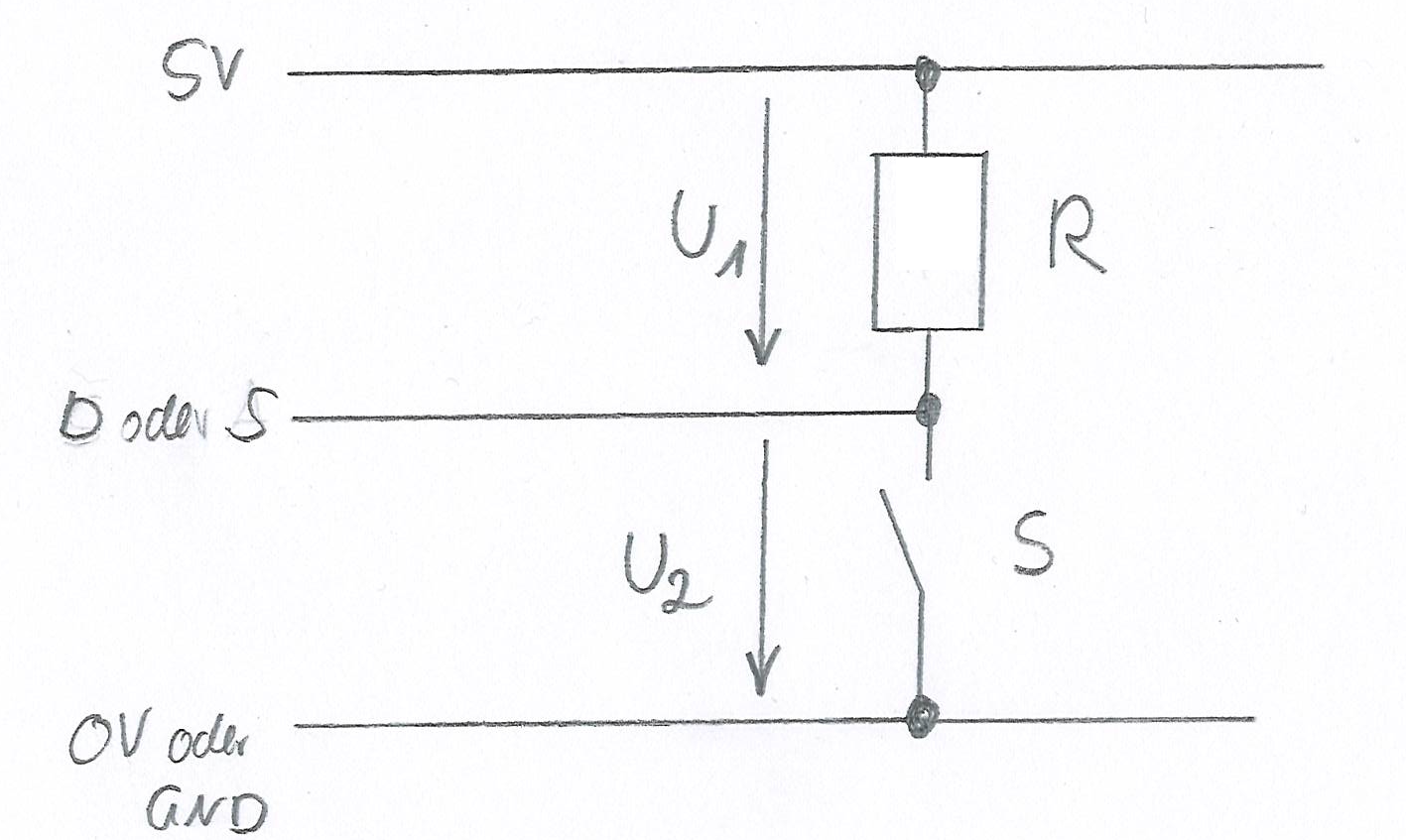
Selbstgebaute Licht- und Tastsensoren |

|
Farbsensor TCS34725 von Adafruit |
|
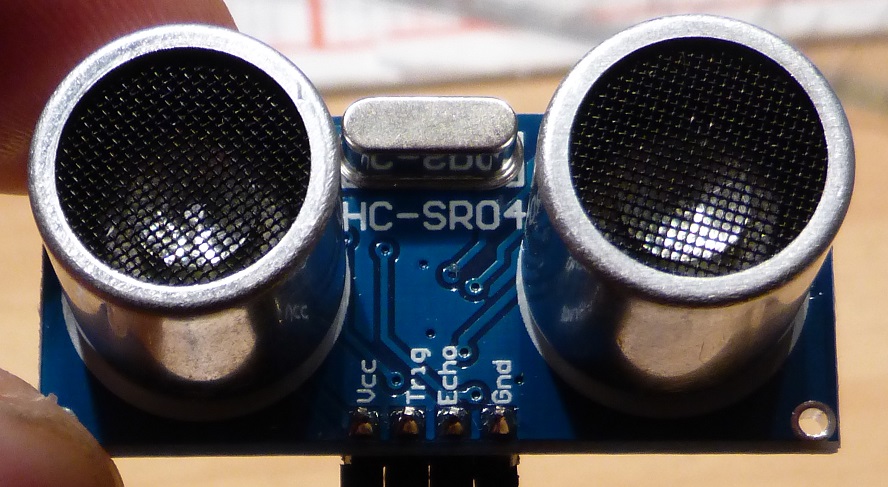
Zuverlässiger Abstandsmesser per Ultraschall |
|
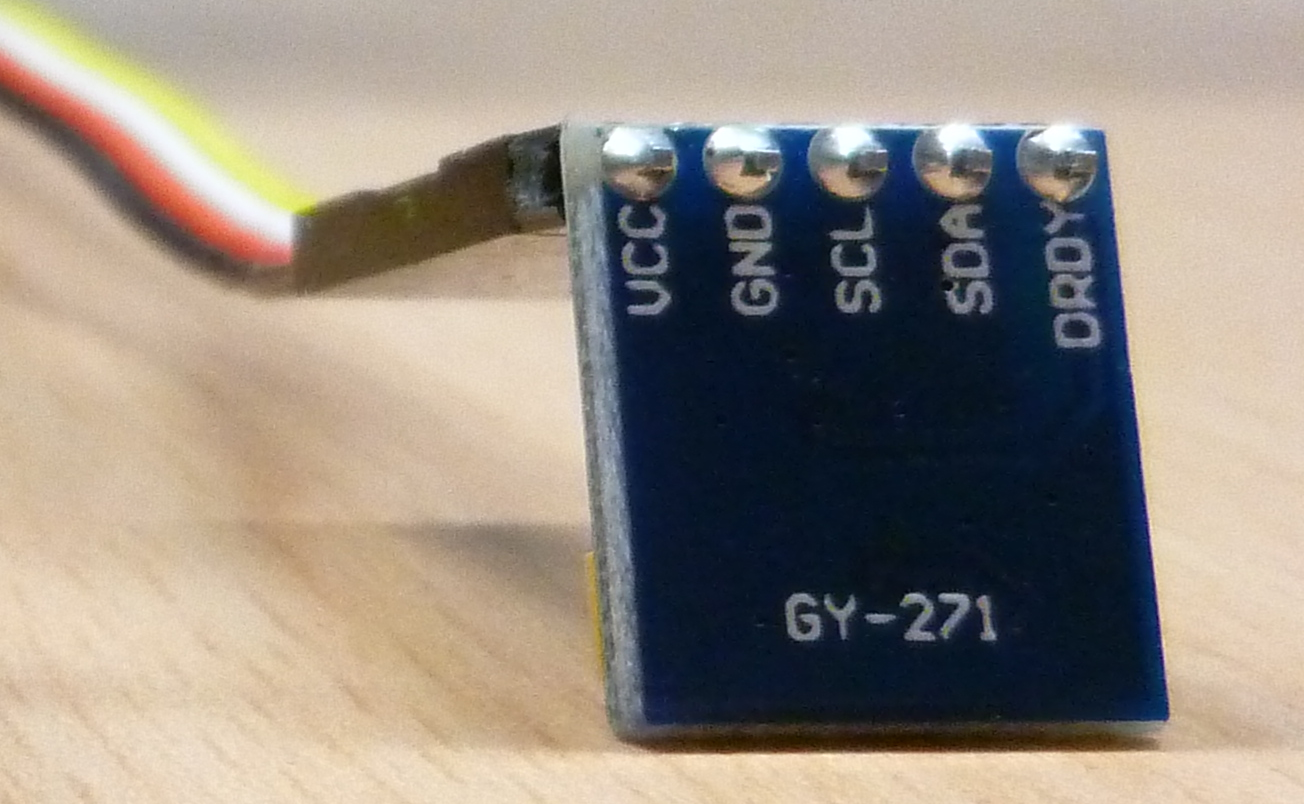
Kompasssensor, der u.a. als Neigungssensor verwendet werden kann |
|
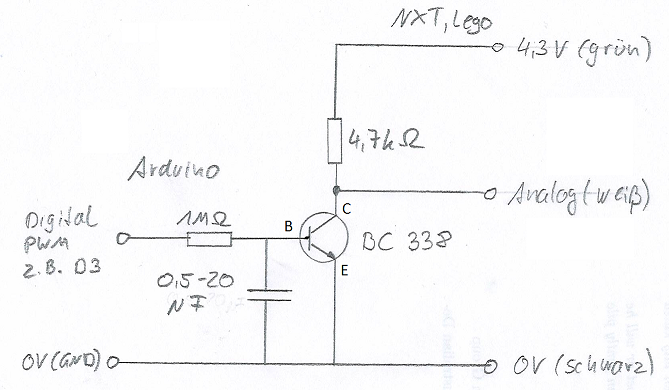
Kommunikation zwischen Arduino-Board und NXT über den I2C-Bus beider Systeme |
|
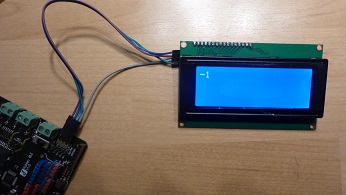
Display, 4 Zeilen mit je 20 Zeichen |
|
... und die anderen Sachen: |
|
|
Interne H-Brücke zur Motorsteuerung bis 0,6A |

|
Externe H-Brücke zur Motorsteuerung bis 2A |
|
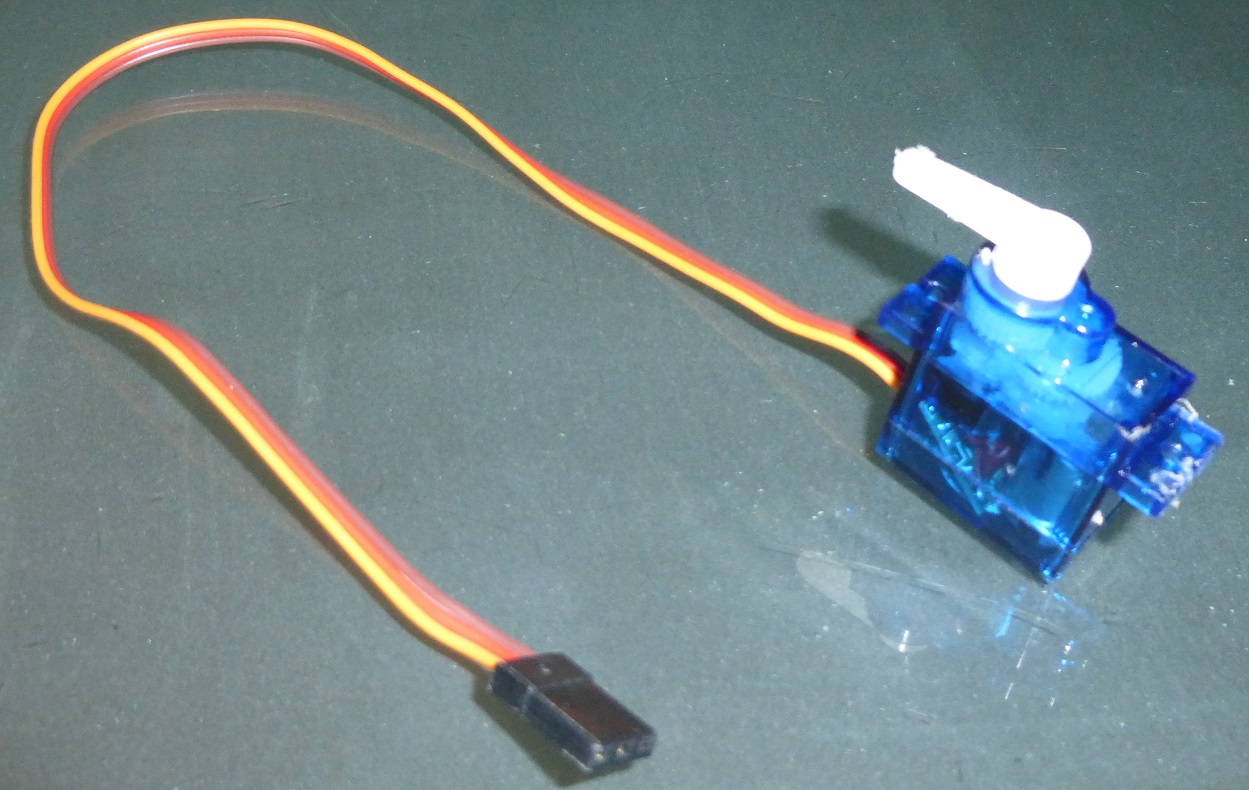
Servomotor von 0 bis 180° |
|
Lichtsensor ohne Eigenlicht |

|
Liniensensor, der nur die digitalen Werte "0" und "1" zurückgibt. |

|
Neigungs-/Erschütterungssensor - allerdings etwas unzuverlässig |

|
Zuverlässiger Abstandsmesser per Ultraschall, etwas komplizierter |
|
Kommunikation vom Arduino-Board zum NXT über einen analogen Eingang des NXTs |